Declarative Vector Programming
Abhiroop Sarkar
OUTLINE
- Motivation
- My Master's Thesis
- Lift-Vector : A library for vector programming
- An alternate programming model?
- Automatic Vectorization (if time permits)
Types of Parallel Machines
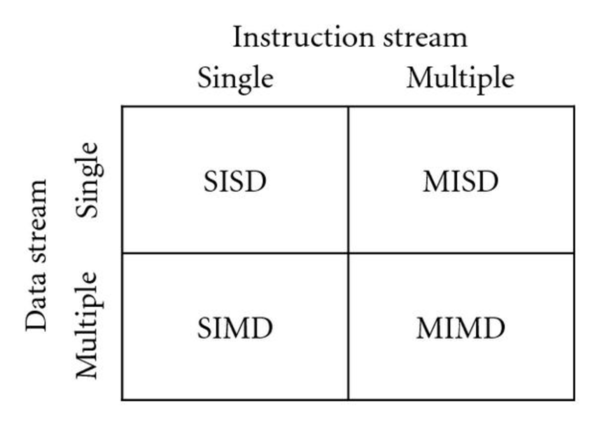
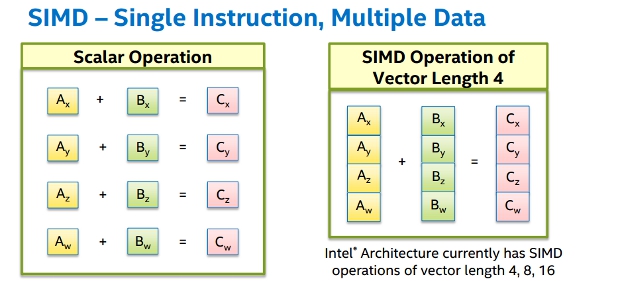
Single Instruction Multiple Data
WHY SIMD?
- Power efficient
- Relative low cost in die area
- Lesser FDE cycles for a given data size
- ML algorithms are data parallel in nature
- Numerical computing algorithms are data parallel
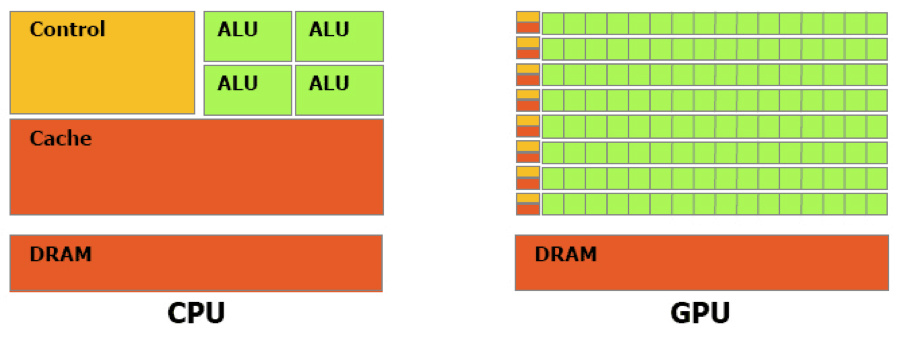
We focus on CPU vector programming.
- More flexible memory model compared to GPUs
- Easier to implement stack and recursion in CPUs
- GPU data transfer bandwidth capped at 15 GB/s
x86 Instruction Set
- Intel
- SSE (Intel P6, 1999)
- SSE2 (Intel Pentium M, 2003)
- SSE3 (NetBurst - Pentium 4, 2004)
- SSE4.1 (Intel Core, 2006)
- SSE4.2 (Nehalem, 2008)
- AVX (SandyBridge, 2011)
- AVX2 (Haswell, 2013)
- AVX512 (Canon Lake, 2018)
- AMD
Compiler Support
- GCC
- LLVM Toolchain
- Dyalog APL
Software Support
- OpenMP
- OpenCL
Can a purely functional language support vectorisation?
Enriching the question...
Can a purely functional language support vectorisation, preserving its original syntax and semantics while being as efficient as low level systems programming languages?
We will attempt to answer this throughout the rest of the presentation
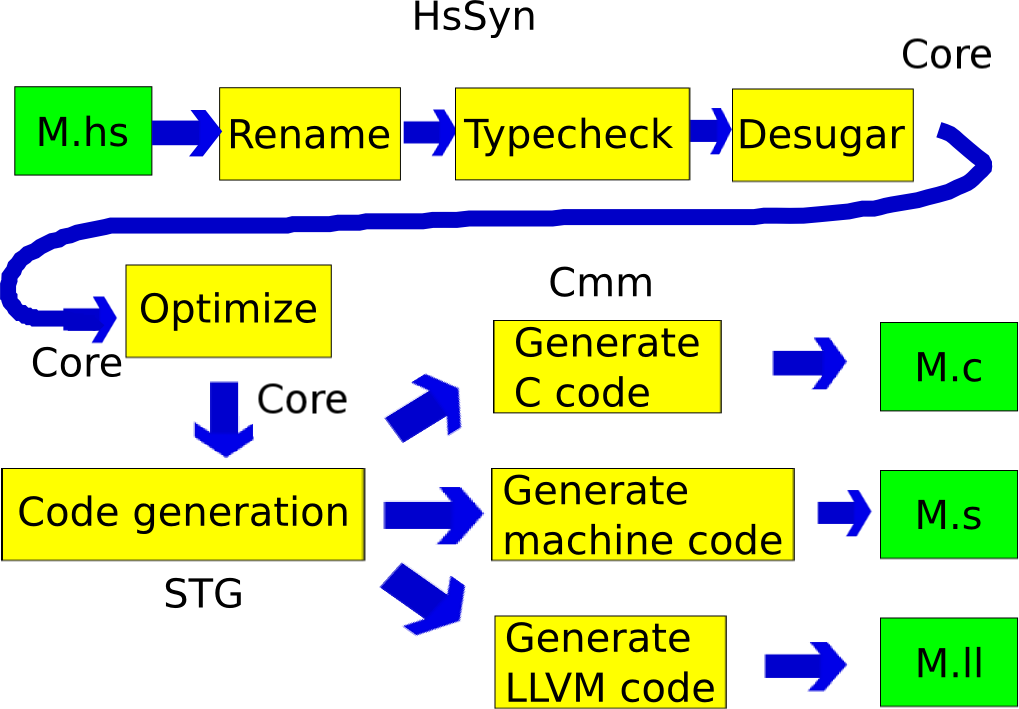
MASTER'S THESIS
Superword Level Parallelism in the Glasgow Haskell Compiler
We will avoid talking about the engineering aspects and try to focus on the research side of the problem.
Float supports FloatX4, a vector data type
Double supports DoubleX2, a vector data type
The user-level API
-- constructors
packFloatX4# :: (# Float#, Float#, Float#, Float# #) -> FloatX4#
broadcastFloatX4# :: Float# -> FloatX4#
-- destructors
unpackFloatX4# :: FloatX4# (# Float#, Float#, Float#, Float# #)
-- operations
plusFloatX4# :: FloatX4# -> FloatX4# -> FloatX4#
minusFloatX4# :: FloatX4# -> FloatX4# -> FloatX4#
timesFloatX4# :: FloatX4# -> FloatX4# -> FloatX4#
divideFloatX4# :: FloatX4# -> FloatX4# -> FloatX4#SSE as well as AVX support
Example : Vectorizing dot product
This spoils the declarative nature of Haskell!
Lift-Vector
Polymorphic SIMD functions for vector programming
Lift-vector provides two interfaces
- Data.Primitive
- Data.Operations
Data.Primitive
class (Num v, Real (Elem v)) => SIMDVector v where
type Elem v
type ElemTuple v
nullVector :: v
vectorSize :: v -> Int
elementSize :: v -> Int
broadcastVector :: Elem v -> v
mapVector :: (Elem v -> Elem v) -> v -> v
zipVector :: (Elem v -> Elem v -> Elem v) -> v -> v -> v
foldVector :: (Elem v -> Elem v -> Elem v) -> v -> Elem v
sumVector :: v -> Elem v
packVector :: ElemTuple v -> v
unpackVector :: v -> ElemTuple vData.Operations
class (Num a, Num b) =>
ArithVector t a b
where
-- | The folding function should be commutative.
fold :: (a -> a -> a) -> (b -> b -> b) -> b -> t b -> b
zipVec ::
(a -> a -> a) -> (b -> b -> b) -> t b -> t b -> t b
fmap :: (a -> a) -> (b -> b) -> t b -> t b
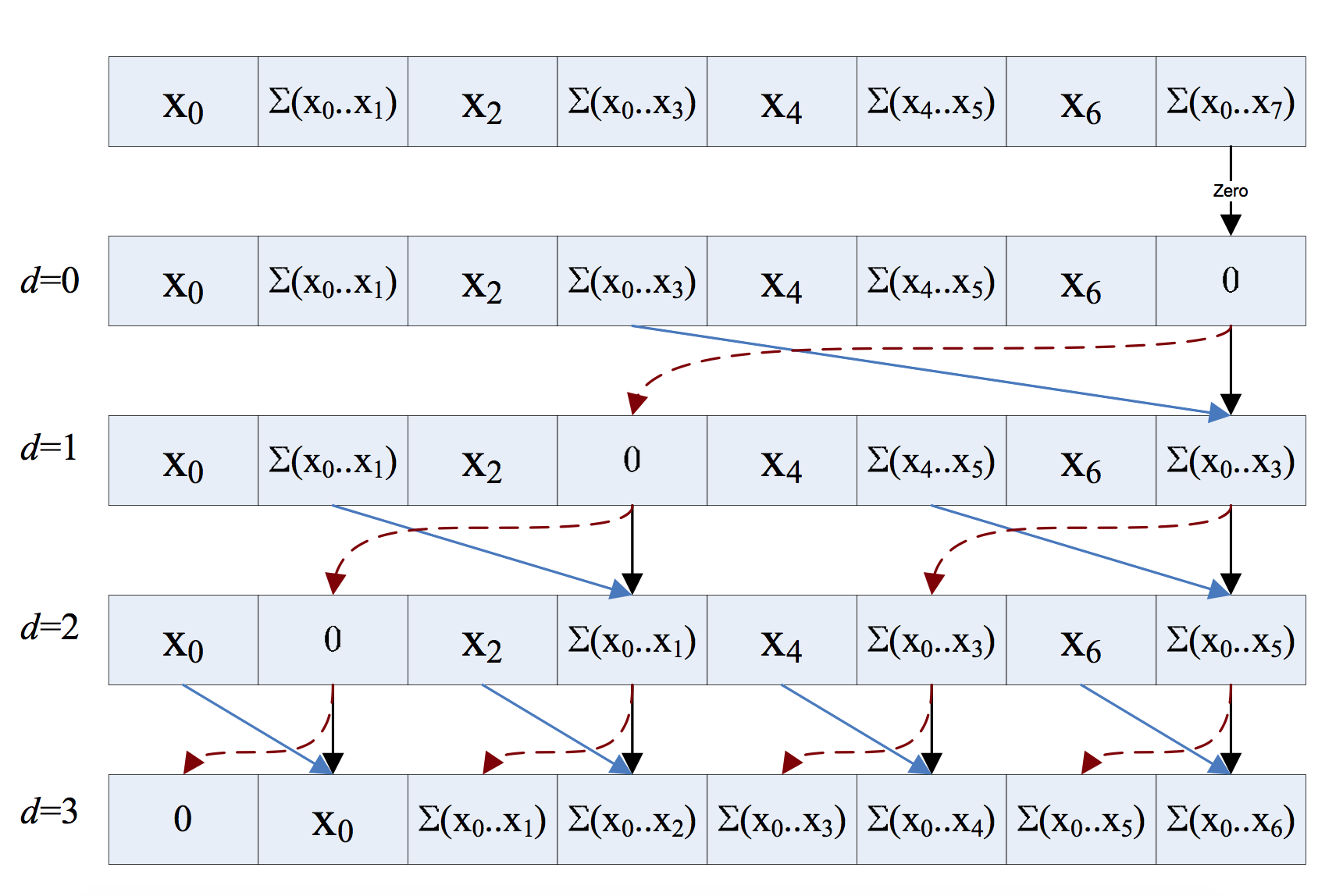
-- | Work efficient Blelloch Scan
scanb :: (a -> a -> a) -> (b -> b -> b) -> b -> t b -> t bVectorised Containers
- Vector Lists
- Vector Arrays (Shape polymorphic)
Vector Lists
newtype VecList a = VecList [a]A wrapper over plain lists
Vector Arrays
Wrappers around unboxed vectors.

import qualified Data.Vector.Unboxed as U
data VecArray sh a = VecArray !sh (U.Vector a)What does dot product look like with the parallel operators?
Vector Lists
dotVec :: [Float] -> [Float] -> Float
dotVec xs ys =
fold (\x y -> x + y :: FloatX4) (\x y -> x + y :: Float) 0 $
zipVec
(\x y -> x * y :: FloatX4)
(\x y -> x * y :: Float)
(toVecList xs)
(toVecList ys)Vector Arrays
dotVec' :: [Float] -> [Float] -> Float
dotVec' xs ys
= let l1 = length xs
l2 = length ys
in fold (\x y -> x + y :: FloatX4) (\x y -> x + y :: Float) 0 $
zipVec
(\x y -> x * y :: FloatX4)
(\x y -> x * y :: Float)
(toVecArray (Z :. l1) xs)
(toVecArray (Z :. l2) ys)How are the Data.Operations operators implemented?
ZIP
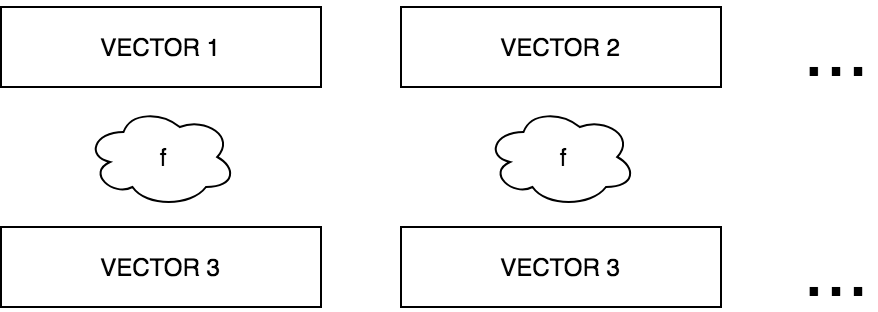
MAP
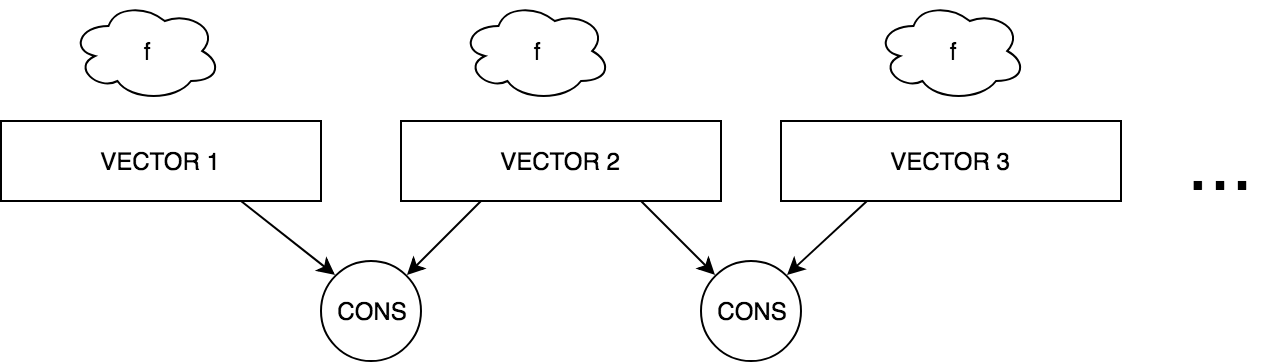
FOLD
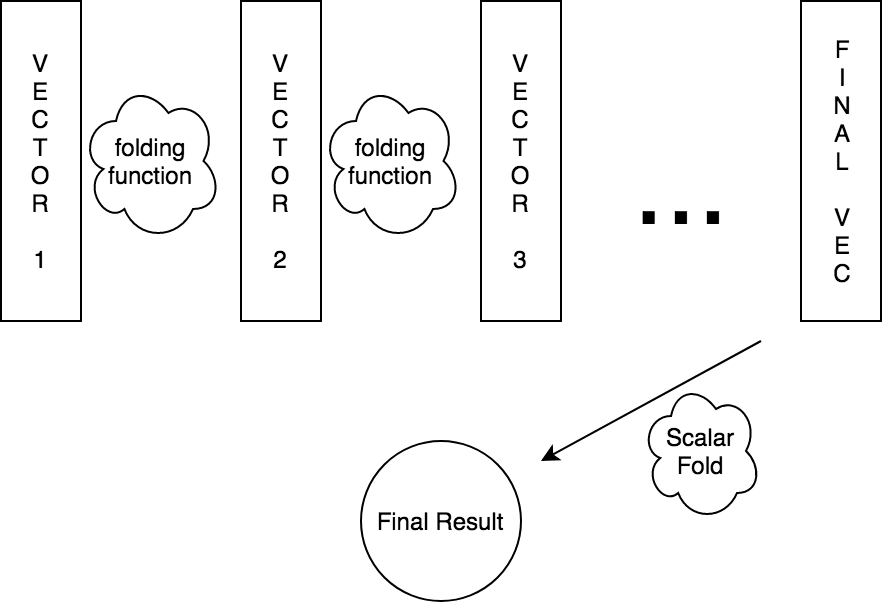
SCAN
scan or prefix sum looks like an inherently sequential operation
> scanl (+) 0 [1, 2, 3, 4, 5, 6, 7, 8]
> [0,1,3,6,10,15,21,28,36]Lift-vector supports a work efficient parallel scan
BLELLOCH SCAN
UPSWEEP
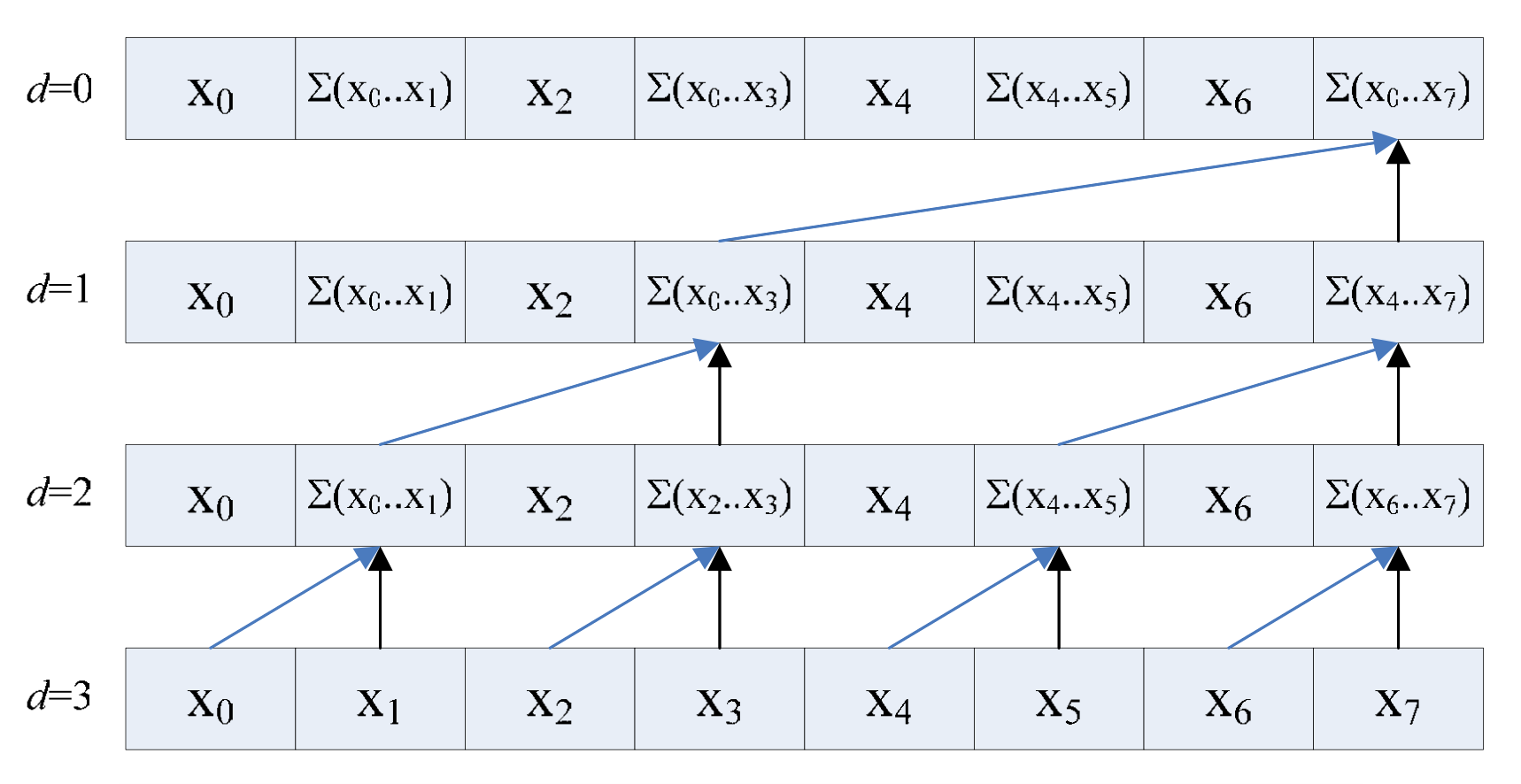
DOWNSWEEP
Benchmarks
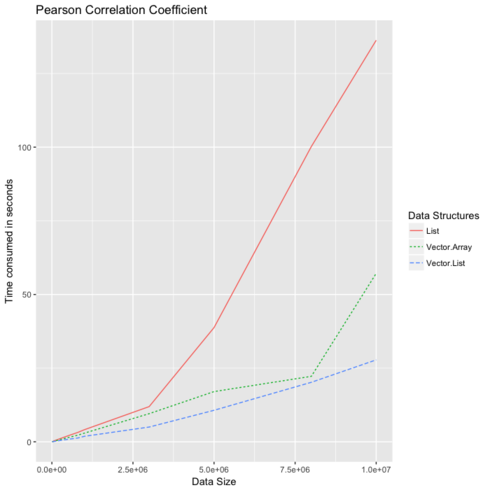
Good benchmarks
Heavy reads and less write
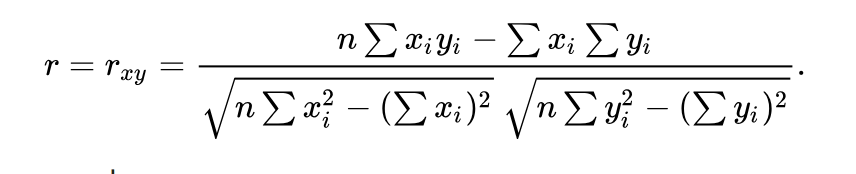
Pearson Correlation Coefficient
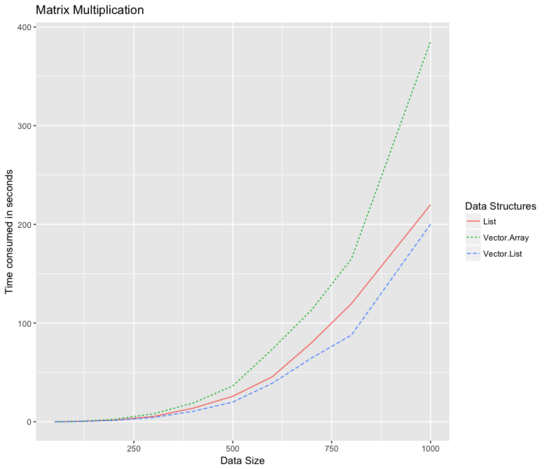
Bad benchmarks
Heavy writes
Eg: Matrix Multiplication
Lift Vector
DISADVANTAGES OF LIFT-VECTOR
- Leaky abstraction
- Supports just flat and regular data parallelism
- No focus on optimizing memory layout
- Number of rewrite opportunities missed
- ...
EXAMPLE
import qualified Data.Operations as Op
foo :: Float -> Float
foo x = x*x + 1
foo' :: [Float] -> [Float]
foo' xs =
Op.fromVecList $
Op.fmap (\x -> x + 1 :: Float) (\x -> x + 1 :: FloatX4) $
Op.fmap (\x -> x * x :: Float) (\x -> x * x :: FloatX4) $
Op.toVecList xsAny calls to map foo should be replaced by foo'
Now,
bar :: [Float] -> [Float]
bar xs = map foo xs
bar :: [Float] -> [Float]
bar = foo'
bar' :: [[Float]] -> [[Float]]
bar' xss = ???NESTED DATA PARALLELISM
Blelloch's solution
Flatten all levels of nesting
concat :: (ArithVector t) => t (t a) -> t a
unconcat :: (ArithVector t) => t (t a) -> t b -> t (t b)
bar' :: [[Float]] -> [[Float]]
bar' xss = unconcat xss (bar (concat xss))This is manually impossible to define in a library
Need the compiler to understand nested structures
MEMORY LAYOUT ISSUES
Records are desugared to Product Types.
Very common to have array of tuples.
VecArray (Float, Float, Float) or VecList (Float, Float, Float)
Current hardware supports load and store vector instructions only for contiguous data
*Xeon Phi instruction set supports non contiguous loads and stores
Generally structure of arrays (SOA) layout is optimal over array of structures (AOS) layout
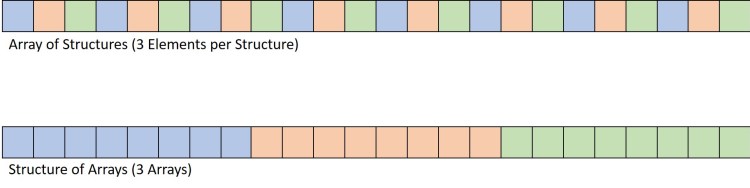
This was not explored in the existing design of lift-vector
What are we looking for?
Tradeoff between :
- An alternate programming model for programming vectors
- A smart compiler (automatic vectorization)
Programming model
- Data Layout
- Syntax
- Semantics
- Data layout
- SOA over AOS
- Flatten nested parallelism
- Handle nested iterators (Palmer et al. 1995)
- ... more exploration
- Semantics of the model
- Parallel by default
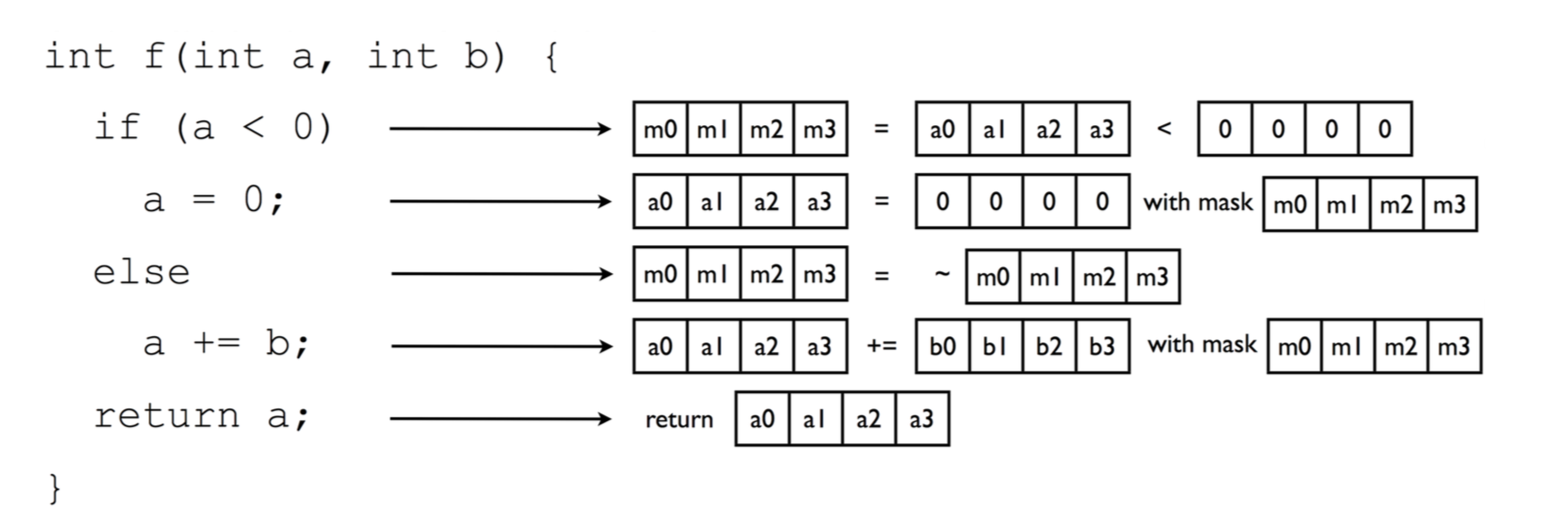
- Express divergent control flow (Karrenberg et al. 2017)
- Differentiate between convergent and divergent control flow
- Eagerly evaluated
- Leverage fusion wherever possible
Whole function vectorization : control flow to data flow - Karrenberg, 2017
- Syntax
- Declarative
Example
-- all functions have parallel semantics unless specified otherwise
quicksort :: [Float] -> [Float]
quicksort [] = []
quicksort xs =
let pivot = srandom xs -- assume srandom pure & sequential
small = select (p <= pivot) xs
large = select (p > pivot) xs
in (quicksort small) ++ [x] ++ (quicksort large)
gang1 gang2
-- irregular data size but NDP can be made work efficientSimply uses relational operators
Vector instruction CMPPSin SSE or VCMPPS in AVX
Merge sort is easier to parallelize
[16 elems] [16elems]
8 8 8 8
4 4 4 4 4 4 4 4
mergesort_spmd xs
let pivot = smiddle xs
(x1, x2) = split xs
in merge (mergesort_spmd x1) (mergesort_spmd x2)
merge :: [a] -> [a] -> [a] - Vectorized SIMD union xs = [9,7,8,1]
/ | \ \
/ | \ \
/ | \ \
/ | \ \
(fork xs) (fork xs) (fork xs) (fork xs)
foo = pack (9,7,8,1)
bar = broadcast pivot
(a,b) foo < barAn existing model on GPUs - SPMD (OpenCL)!
Intel ispc compiler - SPMD on SIMD
Why not just use ISPC?
- No nested data parallelism
- Impure, doesn't provide "safe" parallelism
- A systems language replicating the entire C pointer model
- Explicit uniform and varying memory annotations
So how do we implement our language?
Engineering decision
- GHC might be coaxed to admit nested data parallelism (using source plugins) but SPMD requires major changes in the runtime.
- Write a small functional frontend to LLVM which flattens the data as an optimizer pass.
- Cajole the NESL runtime to an SPMD form and connect it to LLVM.
Conclusion
Haskell has shown[1] that performance at the cost of expressivity is not necessary
There is a always a sweet spot!
Reference
[1] Exploiting Vector Instructions with Generalized Stream Fusion. Mainland et al
THANK YOU FOR LISTENING
EXTRA SLIDES
DISADVANTAGES OF THE SPMD-NDP MODEL
- complex control flow
- V.IMP: Full vectorization can be disastrous
- Flattening destroys the original loops and spoils a number of optimization opportunities
COST OF VECTORIZATION
- Cost model
- Work and Depth (Blelloch, 1996)
- Compiler cost model (reducing pack, unpacks, scatters, gathers)
Throttled Superword Level Parallelism
Convert IR to SSA form
Cytron's algorithm
Hand made graph still SLP vectorized version slower than sequential version of the program
Throttle the vectorization by cutting the graph
Throttling is NP Hard
Can we auto vectorise faster?